適用於車用導航的愛普生 XV4001 系列數位式陀螺儀感測器(車規)
.png)
適用於車用導航的愛普生 XV4001 系列數位式陀螺儀 感測器(車規)
Epson XV4001 系列數位式陀螺儀感測原理和特性
陀螺儀感測器(另稱,角速度感應器),是以單位時間內的旋轉速率來測量角速度。
根據測量方向的不同,角速率有三種類型:
根yaw 偏航,從上方視角觀察車輛在平坦表面的水平旋轉角速度,
pitch 俯仰,從前方視角觀察車輛的垂直旋轉角速度,
rool 滾動,從前方視角觀察車輛的水平旋轉角速度,
由於大多數車輛都是在平坦表面上操作,因此最常使用的是 yaw 偏航測量,偏航測量主要是以平坦表面的水平曲率進行角度量測。
在現今大多數的導航系統中均有安裝陀螺儀感測器,為了在無法正確接收 GPS(全球定位系統)信號的位置時,包括隧道,停車場和建築物之間的區域,可以使用一種稱為航位推算(DR/Dead Reckoning)的演算機制來推估駕駛行進路徑以補正來自 GPS 的定位資訊,提高定位的精準度。
近年來,我們看到許多系統配置感測器作為主要數據來源,以輔助 GPS 定位系統。
DeadReckoning 是透過從陀螺儀感測器檢測到的角速率,換算得出的角度數據以及基於車輛速度 脈衝計算的距離數據相結合來測量車輛位置,進而實現更精確的導航定位系統。
然而對於在導航系統中使用的陀螺儀感測器,當系統不運行時,感測器在停機期間的輸出信號,是至關重要的。這是因為角度數據是透過角速率信號積分來計算的,因此在停機期間的輸出變化也被列入數據計算考量,並可能導致顯著的角度誤差。
由於導航系統可能用於各種極端溫度變化的環境,因此在停機期間陀螺儀感測器輸出信號的溫度變化穩定性(溫度特性)成為一個極為重要的參數。
為了實現高度穩定的溫度特性,愛普生開發了數位輸出陀螺儀感測器,該感測器是一個整合型封裝產品,採用雙 T 結構石英晶體元件,以及用來驅動內部感測器,同時內建可校正靈敏度、停機期 間輸出、可放大輸出信號的特殊功能 IC,並可透過內部 A/D 轉換器(A/D Converter)將類比電壓信號轉換為數位信號。
本文將介紹愛普生感測器技術以及數位輸出陀螺儀感測器的溫度特性與數位介面特性。
【陀螺儀感測器原理及結構】
1. 振動陀螺感測器(科氏力)
陀螺儀感測器是透過將感測器的旋轉速率,轉換為電子信號來計算角速率。
當感測器外部產生旋轉力施加到陀螺儀振動時,在垂直於感測器內振動位置方向上產生的科氏力 會在感測器內部產生新的振動,愛普生運用此感測器內所產生的振動特性加以計算其角速率,以此原理基礎開發出振動陀螺感測器。
(科氏力是法國物理學家加斯帕德-古斯塔夫·德·科里奧利於 19 世紀首次提出的一個物理量它表示在旋轉座標的運動慣性。請參閱下圖 1。)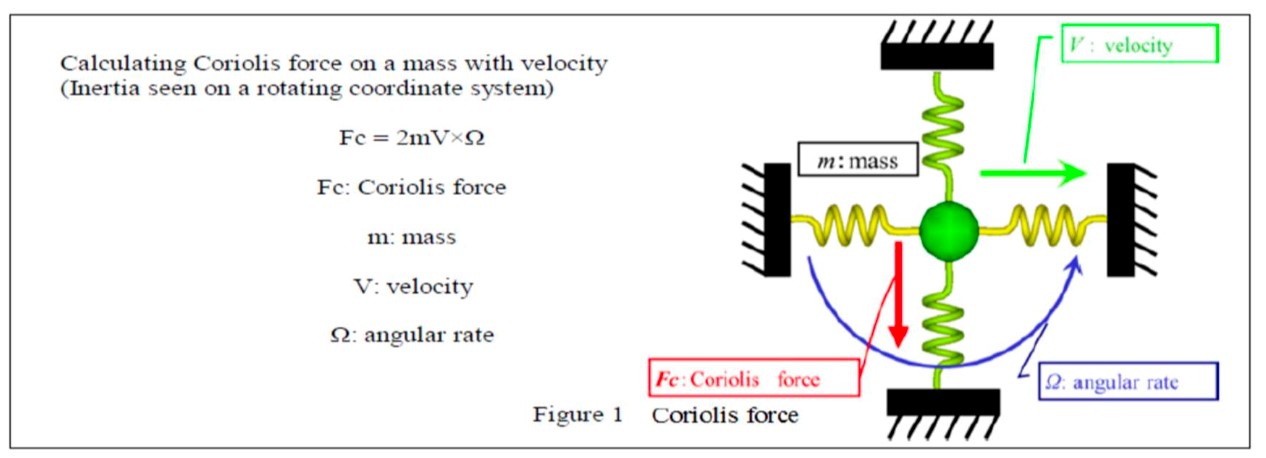
2. 陀螺儀感測器原理(結構)
愛普生陀螺儀感測器使用石英晶體材料作為內部振動元件,並設計成「Double-T(雙 T 結構)」。內部雙 T 結構是相互對稱的,如圖 2 所示,包括中心的「驅動臂」、「感測臂」和「固定部分」。 在感測器動作期間,交替振動電場施加到驅動臂上引起連續的橫向振動。這將可以相互消除洩漏振動,以實現在中心保持靜態的感測臂(圖 2 [1] - 當任何一個驅動臂向左移動時,另一個臂向右移 動。由於左右驅動臂的運動是對稱的,因此不會對中心的靜止部分施加任何力,因此感測臂可保持 靜態),以保持穩定的零點特性。
接下來,當外部旋轉力施加到感測器上時,即使左右驅動臂繼續對稱運動,科里奧利力也在起作 用。這會產生垂直方向的振動(圖 2 [3])。結果,驅動臂的垂直振動將導致其中一個臂向上移動,另一 個臂向下移動。驅動臂的這種垂直振動將導致在靜止部件上施加旋轉力。反過來,靜止部分的旋轉在 先前靜態感測臂中引起橫向振動。藉由讀取由感測臂振動等同於電荷變化關係的特性,可以將檢測施加到感測器上的旋轉視為角度旋轉。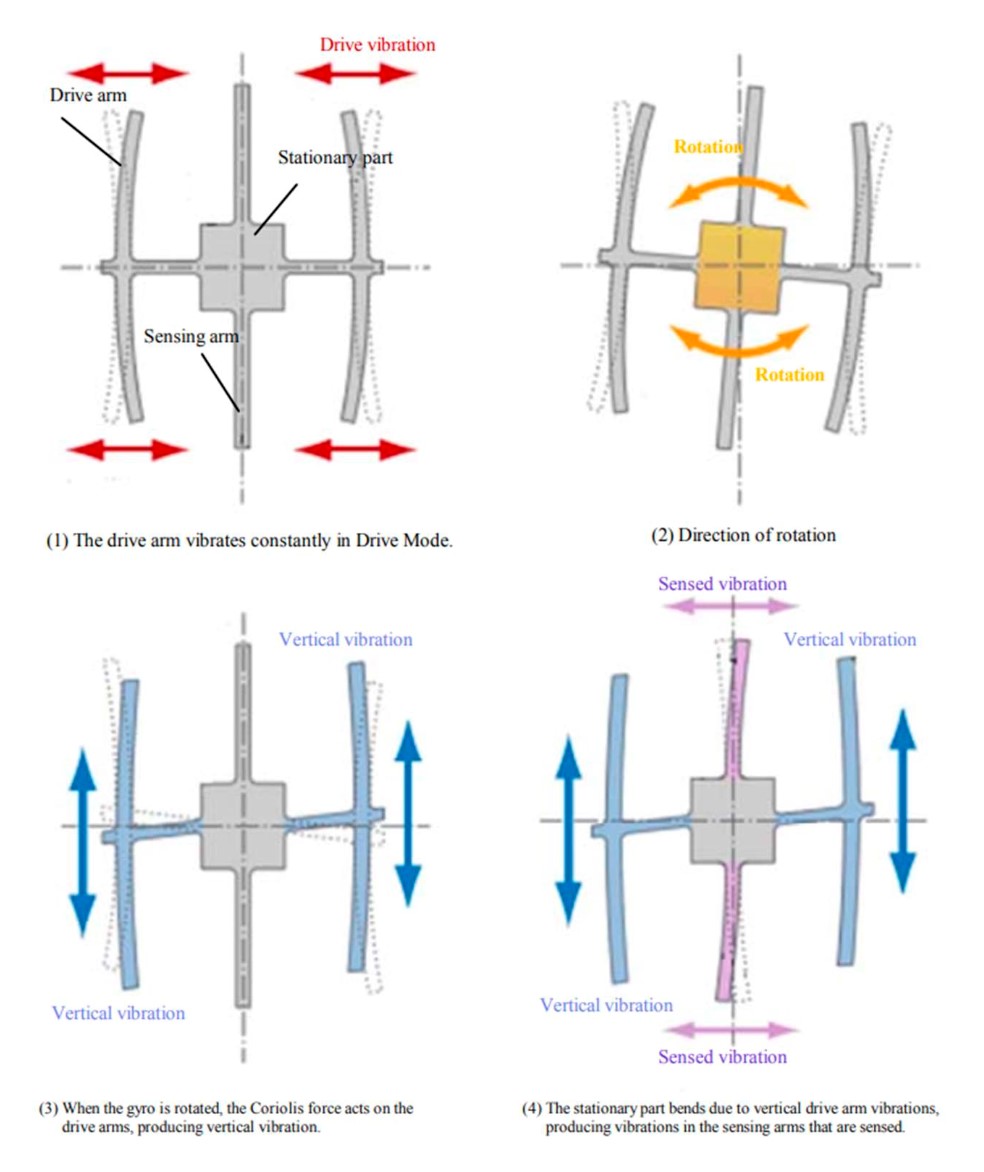
3. 陀螺儀感測器信號處理(模擬陀螺儀感測器的輸出信號處理)
基本陀螺儀感測器(模擬輸出)信號處理圖例(如圖 3)。
(1) 用於施加特定電流並引起驅動臂振動的振盪器電路
(2) 外部旋轉力(角速率 ω)工作以引起科氏力並檢測感測臂中的振動
(3) 檢測信號放大與波形校正
(4) 驅動臂振動相位調整 90o 並與傳感臂的振動波形進行比較以計算角速率。
(隨著傳感臂的振動,旋轉角度為-30o(左方向 30o)和 30o(右方向 30o)旋轉輸出不同的相位信號,將其與驅動振動波形進行比較,可以精確計算角速率和旋轉方向。)
(5) 將輸出電壓調整等同於角速率的電壓
使用輸出電壓與角速率電壓對等調整,將科里奧利力信號與細微檢測信號進行分離再放大輸
出與角速率成比例的電壓。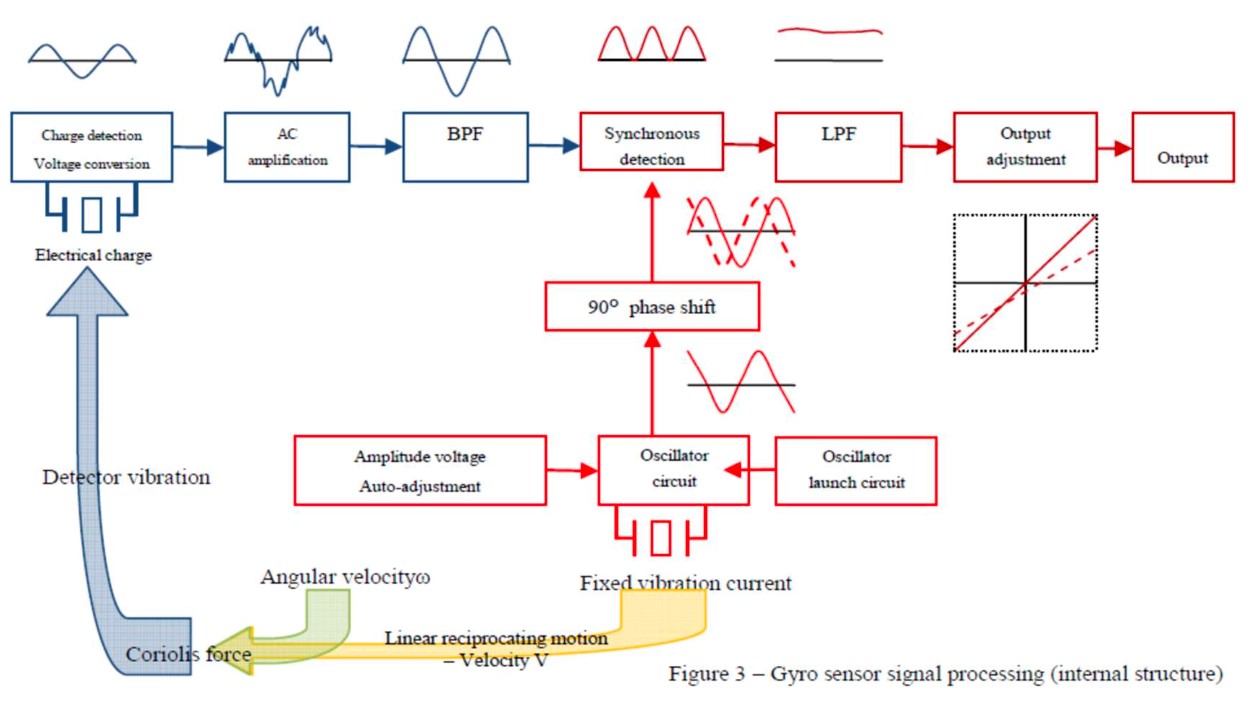
【數位輸出陀螺儀功能與特性】
圖 4 為 XV4001 系列產品的區塊圖,包含內部功能和數位介面說明(SPI[4 線、3 線]、I²C)。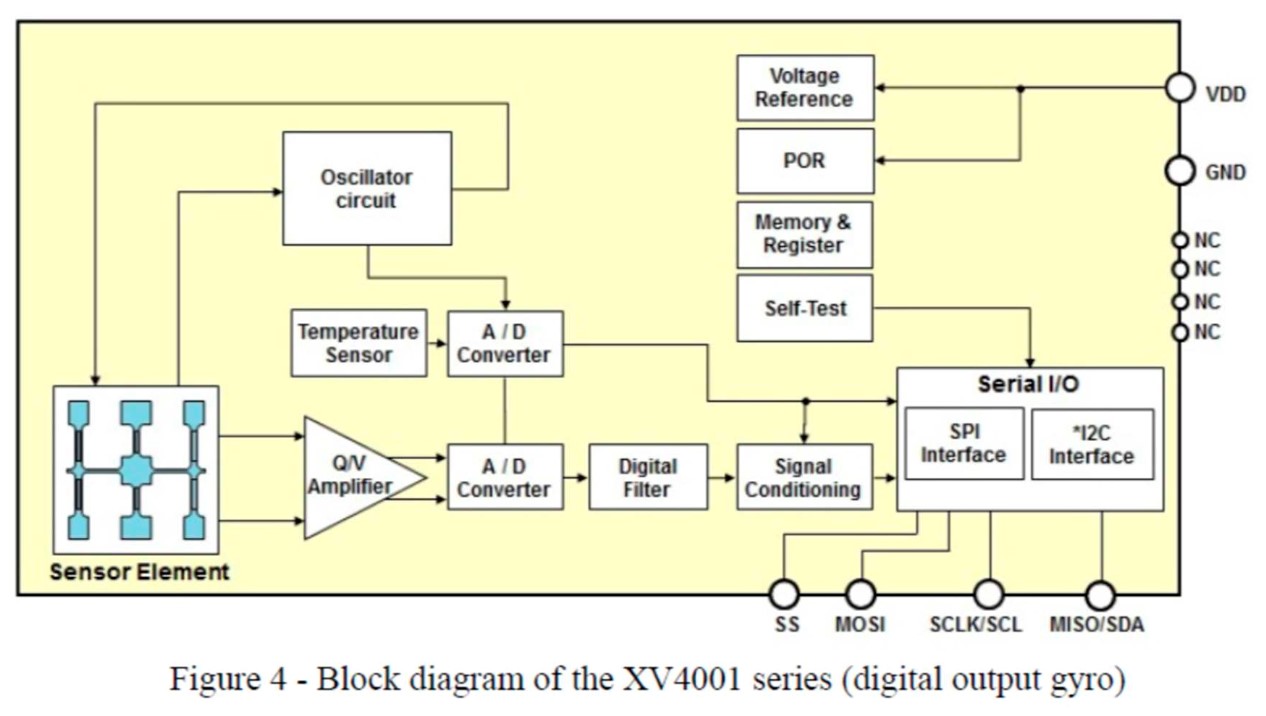
功能
- 角速率輸出:輸出角度數據為 16 位元和 2 的補數。
- 數位濾波器:內建 fc=10Hz 數位低通濾波器。
- 溫度感測器:輸出溫度數據為 11 位元和 2 的補數。
- 電力開啟重置(POR):內建電力開啟重置(以下簡稱 POR)電路。
輸出電源啟動時邏輯電路初始化所需的 POR 信號。
- 自我檢測:內建自我檢測電路。自我檢測實現結果以通信回應(DIAG)的形式傳輸。
數位介面
- SPI(4 線,3 線)
相容於最大通信頻率為 10MHz,包括命令錯誤判斷和校驗和功能,以確保通信品質。還包 括一個自我檢測功能,用於檢測陀螺儀感測器內部的錯誤。該測試結果會將角速率或溫度感 測器輸出進行發送,該測試結果可確認感測器錯誤。
- I2C
相容高達 400 千位元/秒的快速模式。從屬位址配置為 1101000(子位址=1101001)。(子位址的 配置可以在工廠出貨前完成)。可發出自我檢測判斷結果輸出命令以提供自我檢測結果。 如圖 5 所示,陀螺儀感測器與微控制器連結圖例。
對於傳統類比輸出陀螺儀感測器,透過類比/數位轉換器(A/D Converter)進行信號取樣需要在陀螺 儀感測器和 A/D 轉換器之間插入特定的濾波電路,以防止混疊(摺疊雜訊)。
相比之下,XV4001 系列使用數位介面,允許將陀螺儀感測器信號直接發送到微控制器,而無需 A/D 轉換器來調解陀螺儀感測器輸出。此外,XV4001 系列提供匯流排連接的相容性(能夠在同一 條信號線上連接多個設備),與傳統的類比輸出陀螺儀感測器相比,佈線更為容易。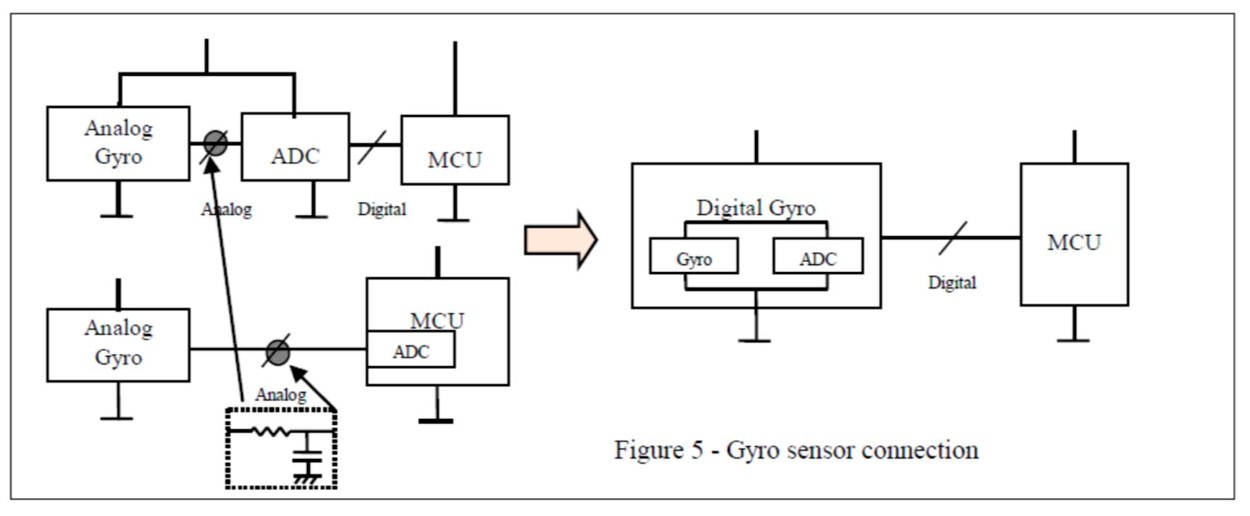
【XV4001 系列陀螺儀感測器特性(溫度特性)】
在理想情況下,陀螺儀感測器的靜態輸出(當沒有應用角速率時)應該是非波動的。然而,由於導航系統集成了陀螺儀感測器輸出的角速率,因此角速率輸出的波動會對精確的定位資訊計算產生 重大影響。影響角速率輸出的差異有多種原因,但主要原因被認為是溫度的變化。沒有溫度補正的 陀螺儀感測器靜態輸出的溫度特性,如圖 6 所示。
愛普生陀螺儀感測器使用石英晶體作為感測器基礎元件。因此,即使不使用溫度補正,角速率輸 出對於溫度變化的影響僅是一個微小的波動。但是,溫度特性趨勢和波動速率會隨著每個感測器元件 的不同而變化。有些導航系統會對陀螺儀感測器角速率輸出的溫度特性進行校正。
然而,由於技術困難和成本相關限制,為能有效實現溫度校正,以獲得獨特的溫度特性趨勢和每 個工作溫度範圍的差異,因此越來越需要一種高穩定性與高相容性溫度特性的角速率輸出陀螺儀感測器,為了滿足這一需求,愛普生採用了數位式補正電路,在靜態輸出期間提供溫度校正。如圖 7 所示,此為採用數位校正電路進行溫度校正的 Epson 陀螺儀感測器的靜態輸出溫度特性。
藉由採用高階溫度補償功能,愛普生陀螺儀感測器實現了穩定的靜態角速率輸出溫度特性,並在-40C 至+85C 的寬工作溫度範圍內顯著的獲得改善。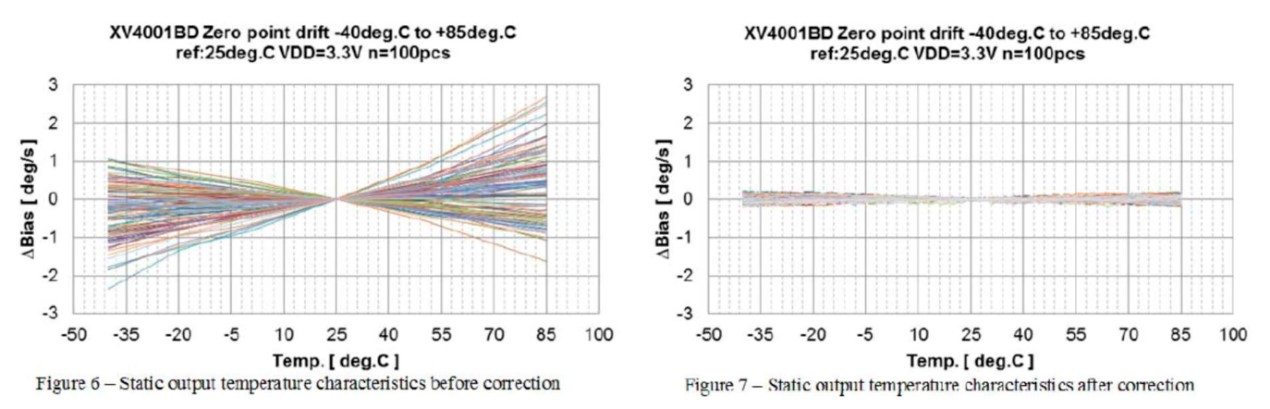
最後,下表顯示 XV4001 系列的功能和概述。 XV4001 系列提供各種封裝的高性能數位輸出陀螺 儀感測器,具有高穩定性、與微控制器的連接彈性、介面相容性和安裝角度多功能性,使其成為車用 導航系統的最佳選擇。
憑藉 XV4001 系列,愛普生將繼續為提高客戶設計優化和產品品質做出貢獻。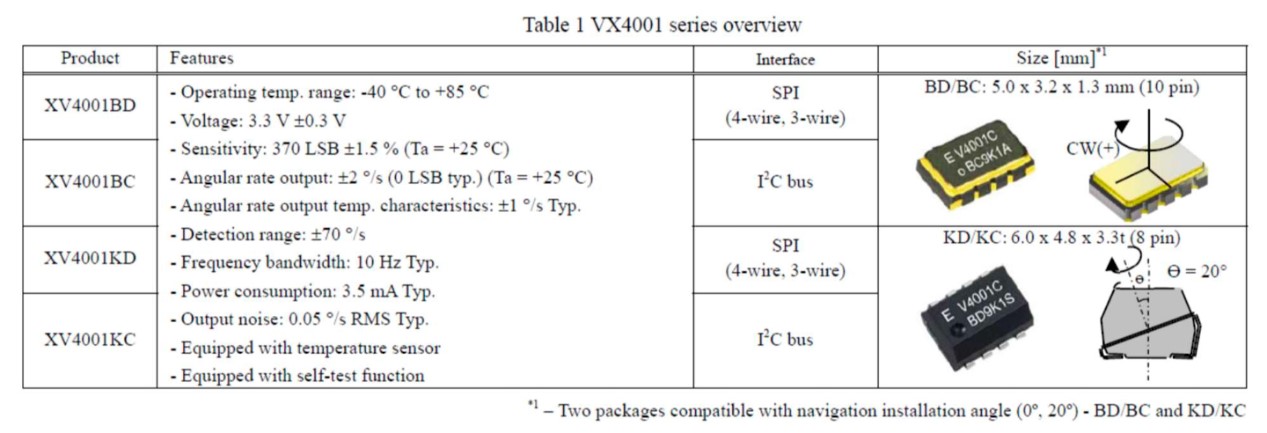
如有任何設計問題時,可洽詢台灣愛普生公司各授權電子零件代理商,或是與我們聯絡。
#Epson #台灣愛普生 #電子零件事業部 #陀螺儀感測器 #Gryo Sensor
瑞澤電子是EPSON電子零件代理商,如有興趣,歡迎聯絡我們。
社群連結:YouTube | Facebook | Twitter